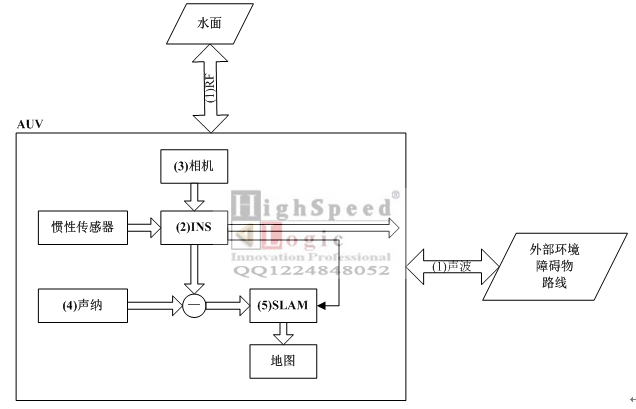
功能描述:
通讯过程加密解密,水上信息传递(RF通讯),水下信息传递(声波传送),这个部分;这个部分主要是在信号传输过程中使用,通过这个部分的内容主要有调制,解调,加密,解密等几个部分组成。
模拟高度计(altimeter Tritech model
PA200-20G);
DVL(LinkQuest NavQuest 600
Micro DVL);
GPS(Navman,3260);
IMU惯性单元(inertial measurement unit
Phidgets 1056 PhidgetSpatial3/3/3);
压力计(pressure sensor MPX5700DP
chip);
推进器(SeaBotix HPDC1500)推进器有四个,两个控制前后,两个控制上下。要做三维的,前后两个推进器有一个静止不动,另一个动,AUV就可以转弯了模拟干扰环境对导航的影响(水流速度,海浪,噪声),以减小到最小误差;
AUV行进过程中,最好有AUV的深度,高度,速度,加速度,压强和位置的图像。还有做一个虚拟的演示系统,跟视频左边一样。可以在给出已知参数的情况下(高度,压力,速度等)模拟出AUV运动。
・第三:可视系统(vision):
仿真出两个vision camera分别拍照,camera可以变换角度,可以反应所拍摄物体与照相机之间的距离,高度等。
可以仿真出在黑暗环境拍照,遇到障碍后拍照。
・第四:声纳(sonar):
模拟声纳探测物体距离大小等,判断是否可以躲开。
第五:SLAM:
要在真实的环境下可以实现绘制路线图。在仿真条件下,根据给定的数据(已知的路线图)绘制出仿真路线图。在预先设定好的路线中,遇到障碍,机器人可以结合vision和声纳减速,采集图片,判断,躲避,在绕过障碍物后继续延设定路线前进。
・第六:总系统:
将上面的系统综合起来进行仿真。



・INS主题对象建模:
模拟高度计,DVL,GPS,IMU惯性单元,压力计,推进器(推进器有四个,两个控制前后,两个控制上下)。
要做三维的,前后两个推进器有一个静止不动,另一个动,AUV就可以转弯了模拟干扰环境对导航的影响(水流速度,海浪,噪声),以减小到最小误差。
AUV行进过程中,最好有AUV的深度,高度,速度,加速度,压强和位置的图像。还有做一个虚拟的演示系统,跟视频左边一样。可以在给出已知参数的情况下(高度,压力,速度等)模拟出AUV运动。

|