功能描述:
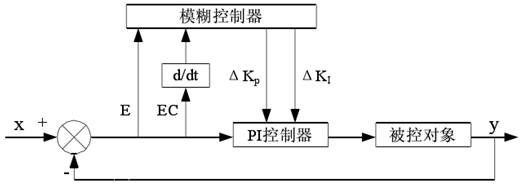
下面重点讲一下模糊PI/PID控制器的设计流程,其基本理论如需所示:
这里,我们所采用的模糊PI的控制方式,可以实现实时参数更新,从而改善控制系统的控制性能,提高控制系统的稳定性和高精度性。
模糊集、论域及隶属度函数的确定
本系统,考虑到控制规则的实际情况,本课题选择7个模糊语言作为模糊规则的基本语句,这里主要为NB (负大)、NM (负中)、NS (负小)、ZO (零)、PS (正小)、PM (正中)、PB (正大)。这里选择的模糊变为输入误差E,输入误差变化率Ec,输出变量和。
输入E、EC和输出的模糊集论域采用Mamdani类型,模糊语言集合为{NB,NM,NS,ZO,PS,PM,PB},在MATLAB中,使用模糊函数编辑工具设计上述讲述的模糊模糊集和隶属函数。常用的隶属函数有梯形分布、三角形分布和正态分布等。
隶属函数的类型决定了系统的控制性能,隶属函数中的曲线斜率越大,其模糊分辨率就越高,系统的控制性能就越低,隶属函数中的曲线斜率越小,其模糊分辨率就越低。系统的控制性能就越高,系统稳定性就越高。
模糊控制规则
模糊控制规则表建立的基本原则为,当误差较大的时候,应尽快的消除误差,而当误差较小的时候,应消除可能存在的超调。就是说,如果实际值和和期望值的偏差负大,而且偏差变化率为负中时,则需要使得Id的输出量为正大。由模糊语言的等级可以得知,模糊控制规则有49条模糊条件语句。
反模糊化
所谓的反模糊化,就是根据模糊推理规则计算出控制器的输出,在通常情况下,反模糊算法主要有加权平均法、限幅元素平均法等算法。
通过MATLAB中的模糊规则的设计方法,可以得到模糊规则的三维效果图,这个三维效果图中的纵坐标表示的是模糊控制器输出控制量u的曲面。其仿真效果如图3所示。

联系:highspeedlogic
QQ :1224848052
微信:HuangL1121
邮箱:1224848052@qq.com
网站:http://www.mat7lab.com/
网站:http://www.hslogic.com/
微信扫一扫:

|