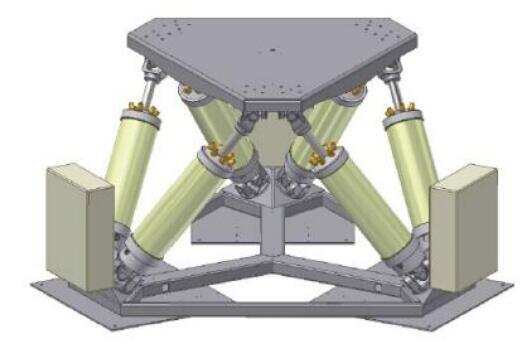
功能描述:
6自由度摇摆台因其具有刚度大、承载能力强、惯性小、位置误差不积累、易于力反馈控制等优点得到了越来越深入的研究与应用。通过分析6自由度并联机构的结构与运动学模型,提出了一种具有全局寻优的基于差分进化的位置正解方法。差分进化方法在充分借鉴遗传进化算法的思想基础上,采用了3个基因的相对信息,可以较好地提升算法的全局寻优能力,而且算法采用实数编码方式更容易在实践中应用。仿真表明了该算法对求解问题起到了很好的全局优化作用。
联系:highspeedlogic
QQ :1224848052
微信:HuangL1121
邮箱:1224848052@qq.com
网站:http://www.mat7lab.com/
网站:http://www.hslogic.com/
微信扫一扫:

|